
Tecnología
Alumnos emplean conducta de animales en robots para búsqueda y rescate
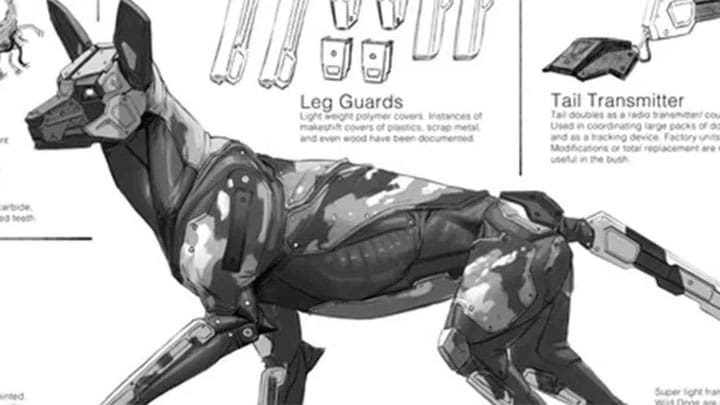
México.- Estudiantes de posgrado del Centro de Investigación Científica y de Educación Superior de Ensenada (CICESE) programan robots miniatura con comportamientos específicos de animales, para llevar a cabo funciones de seguridad, búsqueda y rescate.
El proyecto de los estudiantes adopta la organización colectiva e individual de las hormigas, el vuelo en formación de las aves migratorias y la sincronización de las luciérnagas.
El objetivo de la investigación es adaptar comportamientos colectivos de los animales, cuyas ventajas han sido demostradas, y darles nuevas aplicaciones con robots pequeños o en sistemas no tripulados para realizar misiones, explicó el doctor del CICESE, César Cruz Hernández.
En entrevista con la Agencia Informativa Consejo Nacional de Ciencia y Tecnología (Conacyt), destacó que los robots de este tipo, los cuales son adquiridos para su programación, pueden hacer labores de búsqueda, exploración y reconocimiento, de manera puntual en terrenos inhóspitos, remotos o de desastre.
Por su parte, Juan José Cetina Denis comentó que el comportamiento en apariencia caótico e impredecible de una hormiga es útil para programar robots que desempeñarán tareas como la búsqueda de objetos y patrullajes de seguridad y vigilancia.
“En mi caso, utilizo la matemática que existe detrás del caos para hacer que este robot se mueva de manera impredecible y aparentemente aleatoria en la mesa de trabajo”.
“Las aplicaciones que se le dan en mi trabajo son la búsqueda de objetos, como el robot tiene una cámara integrada, nosotros podemos poner un objeto sobre el espacio de trabajo y el robot se mueve de manera caótica hasta encontrarlo”, describió.
Para el desarrollo de su proyecto, Cetina Denis usó un robot Khepera IV, de forma circular, el cual mide 15 centímetros de radio, cuenta con dos ruedas que trabajan de manera independiente, sensores infrarrojos ultrasónicos, cámara integrada, además de comunicación Wifi y Bluetooth.
Entre los resultados el investigador observó que la eficiencia del robot en labores de búsqueda, además registró tiempos reducidos para encontrar objetos, por lo planea replicar el experimento en drones.
Otro de los proyectos que se desarrollan es el del alumno Miguel Ángel Sidón Ayala, quien emula en los robots el comportamiento social de las luciérnagas mediante el desarrollo del algoritmo que se carga en éstos.
“Utilizo pequeños robots llamados Kilobots, los cuales tienen la capacidad de comunicarse por medio de transductores infrarrojos con los demás robots que se encuentran cerca de ellos, en un radio de aproximadamente 12 centímetros”, dijo.
Asimismo, se llevan a cabo pruebas de distintos comportamientos emergentes como sincronización, adaptado de la interacción de las luciérnagas.


-

 Seguridad3 días ago
Seguridad3 días agoColisión vehicular deja una mujer lesionada en Zitácuaro
-

 Congreso2 días ago
Congreso2 días agoEmma Rivera respalda el liderazgo de Claudia Sheinbaum y reconoce el papel histórico de las mujeres en la consolidación de la Cuarta Transformación
-

 Seguridad2 días ago
Seguridad2 días agoClub Deportivo Zitácuaro Busca Talentos para la Femenicup 2025
-

 Michoacán2 días ago
Michoacán2 días agoPaso Eréndira registra 39 % de avance; beneficiará a 195 mil morelianos: SCOP
-
 Michoacán3 días ago
Michoacán3 días agoSEE garantiza pago de aumento salarial retroactivo a docentes de Michoacán
-

 Seguridad3 días ago
Seguridad3 días agoMotociclista Fallece en Accidente en Carretera Zitácuaro-Tuzantla
-

 Seguridad2 días ago
Seguridad2 días agoSSP inicia curso de verano infantil “Jugando y Aprendiendo con mi Policía”
-

 Zitácuaro3 días ago
Zitácuaro3 días agoToño Ixtláhuac rendirá su Primer Informe de Gobierno mañana lunes 04 de Agosto